En física, el movimiento circular uniforme (también denominado movimiento uniformemente circular) describe el movimiento de un cuerpo con una rapidez constante y una trayectoria circular.
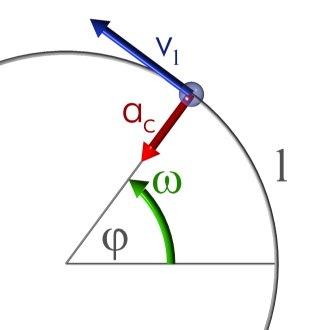
Aunque la rapidez del objeto y la magnitud de su velocidad son constantes, en cada instante cambia de dirección. Circunstancia que implica la existencia de una aceleración que, si bien en este caso no varía al módulo de la velocidad, sí varía su dirección.
Índice
Cinemática del MCU en mecánica clásica[editar]
Ángulo y velocidad angular[editar]
El ángulo abarcado en un movimiento circular es igual al cociente entre la longitud del arco de circunferencia recorrida y el radio.
La longitud del arco y el radio de la circunferencia son magnitudes de longitud, por lo que el desplazamiento angular es una magnitud adimensional, llamada radián. Un radián es un arco de circunferencia de longitud igual al radio de la circunferencia, y la circunferencia completa tiene radianes.
La velocidad angular es la variación del desplazamiento angular por unidad de tiempo:
Partiendo de estos conceptos se estudian las condiciones del movimiento circular uniforme, en cuanto a su trayectoria y espacio recorrido, velocidad y aceleración, según el modelo físico cinemático.


Posición[editar]
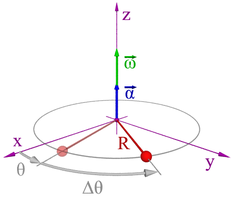
 Se considera un sistema de referencia en el plano x,y, con vectores unitarios en la dirección de estos ejes . La posición de la partícula en función del ángulo de giro y del radio r es en un sistema de referencia cartesiano x,y:
Se considera un sistema de referencia en el plano x,y, con vectores unitarios en la dirección de estos ejes . La posición de la partícula en función del ángulo de giro y del radio r es en un sistema de referencia cartesiano x,y:
De modo que el vector de posición de la partícula en función del tiempo es:
siendo:
- : es el vector de posición de la partícula.
- : es el radio de la trayectoria.
Al ser un movimiento uniforme, a iguales incrementos de tiempo le corresponden iguales desplazamientos angulares, lo que se define como velocidad angular (ω):
El ángulo (φ), debe medirse en radianes:
donde s es la longitud del arco de circunferencia
Según esta definición:
1 vuelta = 360° = 2 π radianes
½ vuelta = 180° = π radianes
¼ de vuelta = 90° = π /2 radianes










Según esta definición:
¼ de vuelta = 90° = π /2 radianes
Velocidad tangencial[editar]
La velocidad se obtiene a partir del vector de posición mediante derivación tangencial:
La relación entre la velocidad angular y la velocidad tangencial es:
El vector velocidad es tangente a la trayectoria, lo que puede comprobarse fácilmente efectuando el producto escalar y comprobando que es nulo.



Aceleración[editar]
La aceleración, que para el movimiento circular uniforme es siempre normal, se obtiene a partir del vector velocidad con la derivación:
de modo que
Así pues, el vector aceleración tiene dirección opuesta al vector de posición, normal a la trayectoria y apuntando siempre hacia el centro de la trayectoria circular, por lo que acostumbramos a referirnos a ella como aceleración normal o centrípeta.
El módulo de la aceleración es el cuadrado de la velocidad angular por el radio de giro, aunque lo podemos expresar también en función de la celeridad de la partícula, ya que, en virtud de la relación , resulta
Esta aceleración es la única que experimenta la partícula cuando se mueve con rapidez constante en una trayectoria circular, por lo que la partícula deberá ser atraída hacia el centro mediante una fuerza centrípeta que la aparte de una trayectoria rectilínea, como correspondería por la ley de inercia.





Movimiento circular y movimiento armónico[editar]
En dos dimensiones la composición de dos movimientos armónicos de la misma frecuencia y amplitud, convenientemente desfasados, dan lugar a un movimiento circular uniforme. Por ejemplo un movimiento bidimensional dado por las ecuaciones:
El momento angular puede calcularse como:
De hecho las órbitas planetarias circulares pueden entenderse como la composición de dos movimientos armónicos según dos direcciones mutuamente perpendiculares.


Período y frecuencia[editar]
El período representa el tiempo necesario para que el móvil complete una vuelta y viene dado por:
La frecuencia mide el número de revoluciones o vueltas completadas por el móvil en la unidad de tiempo y viene dada por:
Por consiguiente, la frecuencia es la inversa del período:





Movimiento circular en mecánica relativista[editar]
Si bien la teoría especial de la relatividad permite que una partícula no cargada esté en movimiento circular uniforme, esto en general no resulta posible para una partícula cargada a la que no se le suministra energía adicional. Esto se debe a que una partícula cargada acelerada emite radicación electromagnética perdiendo energía en ese proceso. Eso es precisamente lo que sucede en un sincrotrón que es un tipo de acelerador de partículas (de hecho la radicación de sincrotón emitida por partículas aceleradas en un anillo puede usarse con fines médicos).
Además, en la mecánica relativista el cociente entre la fuerza centrípeta y la aceleración centrípeta, es diferente del cociente entre la fuerza tangencial y la aceleración tangencial. Esto introduce una diferencia fundamental con el caso newtoniano: la aceleración y la fuerza relativistas no son vectores necesariamente paralelos:
De la relación anterior, se deduce que la fuerza y la aceleración sólo son paralelas en dos casos:
El primer caso se da cuando la aceleración y la velocidad son perpendiculares, cosa que sucede en el movimiento circular uniforme (o helicoidal uniforme). El segundo caso se da en un movimiento rectilíneo. En cualquier otro tipo de movimiento en general la fuerza y la aceleración no serán permanentemente paralelas.
![{\displaystyle \mathbf {F} ={\frac {\mathrm {d} }{\mathrm {d} t}}\left({\frac {m\mathbf {v} }{\sqrt {1-{\frac {v^{2}}{c^{2}}}}}}\right)={\frac {m\mathbf {v} }{\left[1-{\frac {v^{2}}{c^{2}}}\right]^{3/2}}}\left({\frac {\mathbf {v} }{c^{2}}}\cdot \mathbf {a} \right)+{\frac {m\mathbf {a} }{\sqrt {1-{\frac {v^{2}}{c^{2}}}}}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e9bc2712c1b7d87578f771b6d1b33207e011f8f1)

Movimiento circular en mecánica cuántica[editar]
En mecánica cuántica si bien no puede hablarse de trayectoria con precisión pueden ser analizados los estados cuánticos estacionarios de unas partículas que deben moverse a lo largo de un anillo. Los estados estacionarios de una partícula en un anillo son el análogo cuántico del movimiento circular uniforme. Para una partícula moviéndose sobre un anillo con momento angular bien definido la función de onda viene dada por:
Puede observarse que la densidad de probabilidad es uniforme, al igual que sucede en el caso clásico.
Un hecho interesante es que las predicciones para una partícula cargada, en movimiento circular uniforme, es que ésta no tiene porqué emitir fotones, de la misma manera que el electrón orbitante alrededor del núcleo atómico no emite energía, por ser el valor resultante de la aceleración vectorial nula, al ser la distribución simétrica respecto al núcleo atómico.

La trayectoria Circular
Un móvil puede moverse describiendo cualquier tipo de trayectoria. Por ejemplo, en una carretera un automóvil puede moverse describiendo una línea recta, pero cuando llega a una curva pronunciada, generalmente su trayectoria es un arco de circunferencia.
Para describir la distancia, la posición o el desplazamiento en un movimiento rectilíneo, utilizamos como unidad de medida el metro [m]; en cambio, en la descripción del movimiento circular usamos el metro como unidad de distancia o arco recorrido, y para determinar la posición y el desplazamiento utilizamos también una unidad angular, conocida como radián [rad].
Lo anterior se debe a que en el movimiento circular es fundamental la relación entre los tres elementos que se muestran en la Figura el arco recorrido (∆s), el radio de curvatura (r) y el ángulo descrito (∆θ).

La posición de un móvil en movimiento circunferencial queda definida por el ángulo descrito respecto a un eje de referencia. Este ángulo se mide en radianes

En la figura se muestra que un móvil parte desde una posición angular Өi para después de un tiempo estar en la posición angular Өf ,por lo tanto podemos decir que se ha desplazado recorriendo cierto desplazamiento angular ∆θ y cierto arco de circunferencia ∆s
r·∆θ=∆s

Magnitudes vectoriales del MCU

La rapidez angular podemos decir que es la razón de cambio del desplazamiento, cuando desplazamiento angular realizo en cierto tiempo. Ahora vamos a diferenciar que es la rapidez media angular y la velocidad angular.
Como hemos aprendido cuando un cuerpo se mueve con velocidad constante, el módulo de ese vector es lo que llamamos rapidez, así podemos decir que cuando hablamos de la rapidez media angular, estamos referiéndonos sólo al módulo, porque para hablar de velocidad debemos suponer que el intervalo de tiempo tiende a cero.
Por lo tanto para el movimiento circular también se cumple que:
Como hemos aprendido cuando un cuerpo se mueve con velocidad constante, el módulo de ese vector es lo que llamamos rapidez, así podemos decir que cuando hablamos de la rapidez media angular, estamos referiéndonos sólo al módulo, porque para hablar de velocidad debemos suponer que el intervalo de tiempo tiende a cero.
Por lo tanto para el movimiento circular también se cumple que:

Las relaciones vectoriales entre la velocidad tangencia, el radio vector y la velocidad angular son:


Periodo

El periodo se define como el tiempo que un sistema físico demora en completar un ciclo. Generalmente se usa el concepto de periodo referido al tiempo que se demora una onda en completar una oscilación, pero en el MCU, podremos entenderlo como el tiempo que demora en dar una vuelta completa un cuerpo.
El periodo se mide en unidades de tiempo y en el S.I en segundos.

Frecuencia
La frecuencia está asociada a todo sistema fśico que realiza movimientos periódicos. Por lo general está asociada a las ondas como la cantidad de ciclos en cierto intervalo de tiempo, en otros casos está asociada a los motores como una medida de las revoluciones (vueltas) que da en un determinado tiempo.
La frecuencia se mide en unidades de tiempo⁻¹, por ejemplo
La frecuencia se mide en unidades de tiempo⁻¹, por ejemplo

Frecuencia y periodo
Ambas variables son inversamente proporcional entre si, cuando una de ellas aumenta la otra disminuye y la constante de proporcionalidad vale 1. En el caso del movimiento circular uniforme, como siempre demora el mismo tiempo en completar una vuelta, estaremos siempre trabajando con frecuencias y periodos constantes en el tiempo.


Aquí se muestra la gráfica del periodo versus frecuencia.
Frecuencia y rapidez angular

Comentarios
Publicar un comentario